
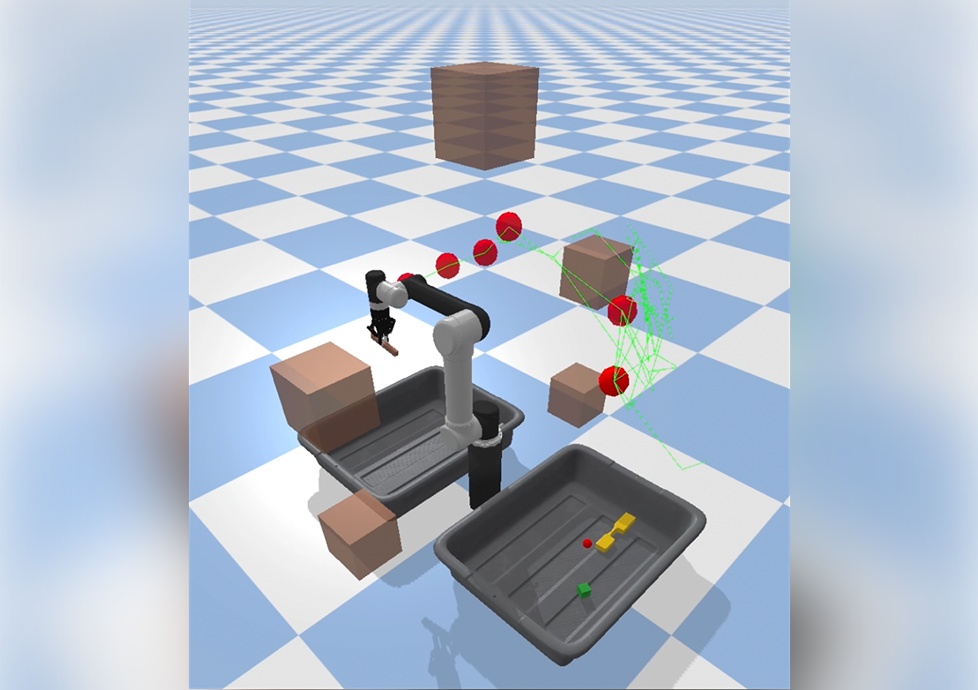
RRT algorithm implemented for path planning to move the robot from one location to another while avoiding collisions with obstacle.
Project Details
The pipeline for the project is as follows:
- train segmentation network
- predict segmentation mask
- generate point cloud of objects
- use ICP to align the original object to the segmented object point cloud
- grasp object
- transfer to other bin using RRT while avoiding collisions